Töö kirjeldus
Automaatne , mis arvutab kauguse takistusteni ja pöördeid olenevalt takistuse asukohast
Töö protsess
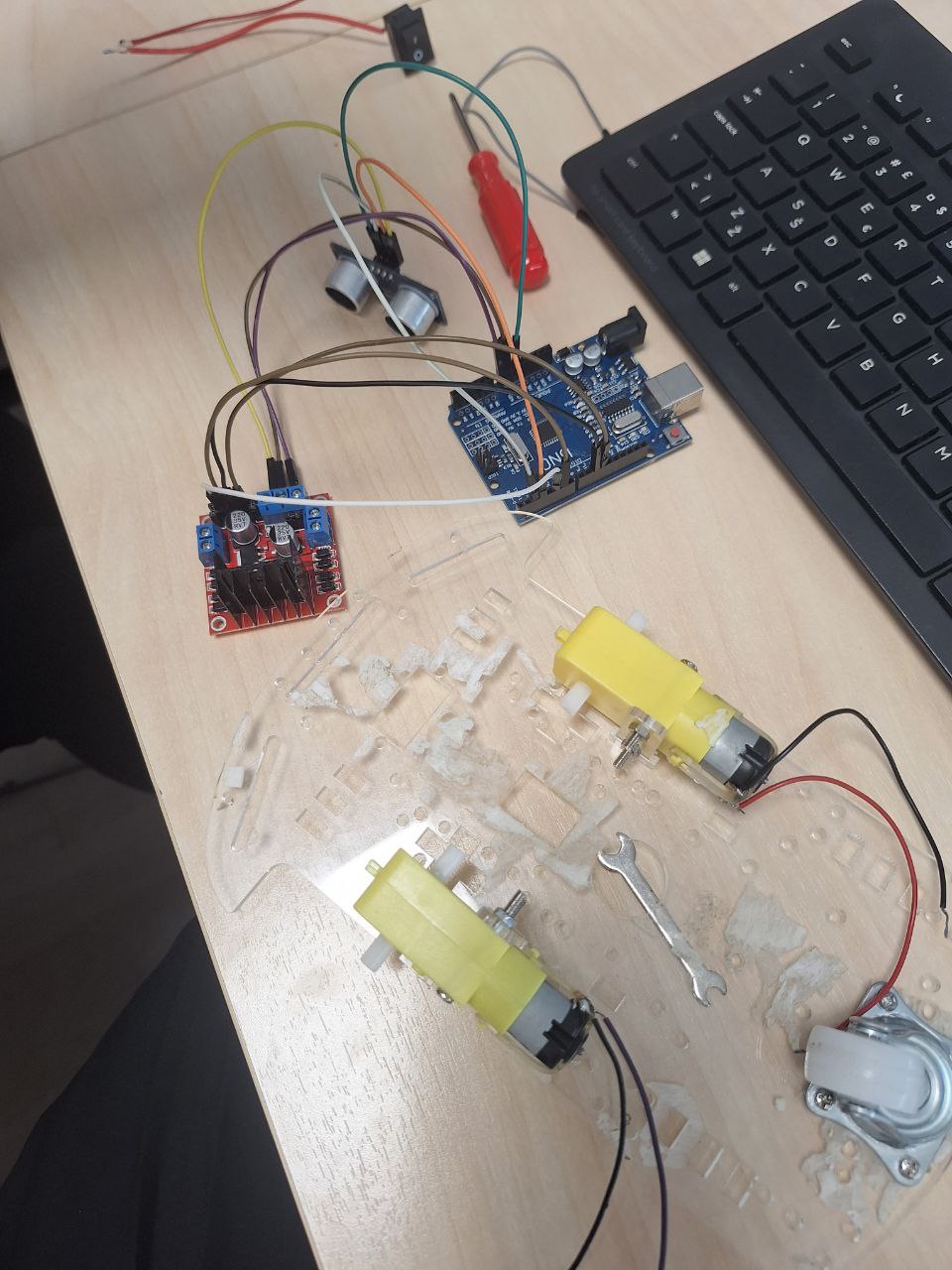
Auto toitub patareidest, esirattad töötavad mootoritest ja tagumised võtsime legost. Teoreetiliselt sõidab auto 2 sekundit edasi, peatub ja loeb kaugust takistuseni, keerates anduri külgedele ja kui kuskil on takistus, siis keerab takistusest teises suunas.
Alguses oli mõte teha üks staatiline andur, siis paigaldasime teise ja ikka ei saanud teha seda, mida plaanisime. Selle tulemusena jõudsime järeldusele, et paneme anduri servomootori küljes olevale alusele.
Kasutatud komponeendid
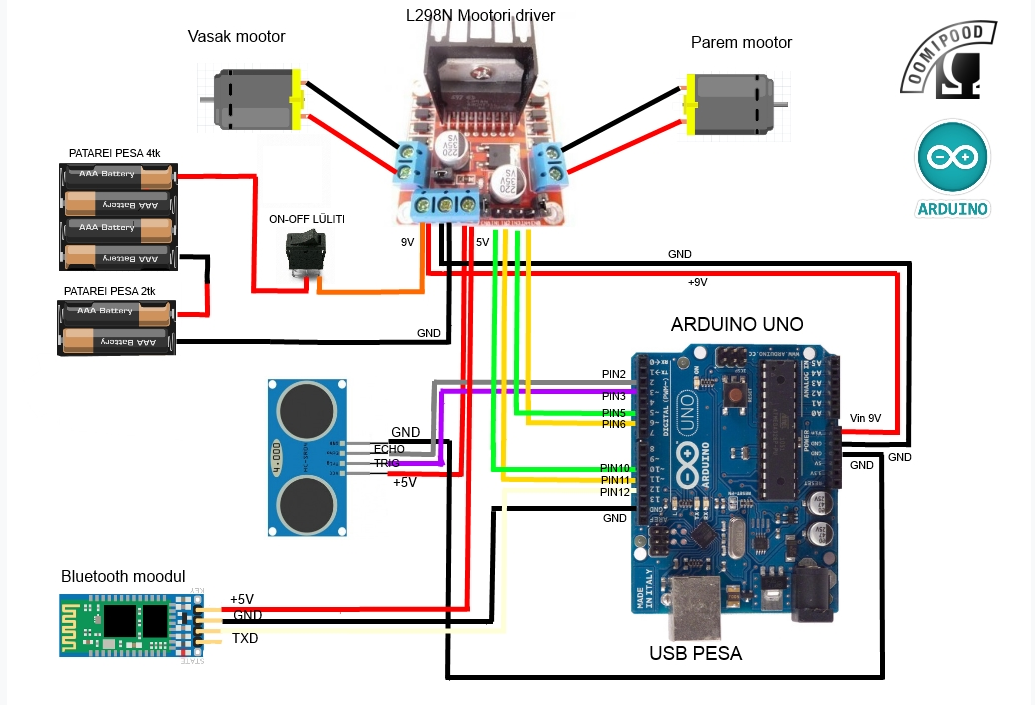
- Arduino plaat(UNO)
- L298N Mootori driver
- Mootorid (2tk)
- Patarei pesa 4tk
- Patarei pesa 5tk
- On-off lüliti
- Kaugusemõõtmise andur (1tk)
- Juhtmed (10tk)
- Palju teipi
- Lego rattad (2tk)
Skeem
Kood
const int trigPin = 3;
const int echoPin = 2;
const int trigPin2 = 9;
const int echoPin2 = 7;
float dist_check1, dist_check2;
long duration, distance;
int dist_result;
//MOTORS VARIABLES
const int mot1f = 6;
const int mot1b = 5;
const int mot2f = 11;
const int mot2b = 10;
int mot_speed_right = 75;
int mot_speed_left = 130;
int k = 0; //BRAKE
//LOGICS VARIABLES
const int dist_stop = 20;
const int max_range = 1200;
const int min_range = 20;
int closerSensor = 0;
int errorLED = 13;
//FUNCTIONS
int ping() { //CHECK DISTANCE FUNCTION
int sumDistances1 = 0, sumDistances2 = 0;
for(int i = 0; i < 3; i++) {
digitalWrite(trigPin, 0);
delayMicroseconds(2);
digitalWrite(trigPin, 1);
delayMicroseconds(10);
digitalWrite(trigPin, 0);
duration = pulseIn(echoPin, 1);
distance = duration / 58;
sumDistances1 += distance;
digitalWrite(trigPin2, 0);
delayMicroseconds(2);
digitalWrite(trigPin2, 1);
delayMicroseconds(10);
digitalWrite(trigPin2, 0);
duration = pulseIn(echoPin2, 1);
distance = duration / 58;
sumDistances2 += distance;
}
float avgDistance1 = sumDistances1 / 3;
float avgDistance2 = sumDistances2 / 3;
int closerSensor = (avgDistance1 < avgDistance2)? 1 : 2;
dist_result = avgDistance1 + avgDistance2;
Serial.print("Average Distance 1: ");
Serial.println(avgDistance1);
Serial.print("Average Distance 2: ");
Serial.println(avgDistance2);
Serial.print("Total Distance Result: ");
Serial.println(dist_result);
return dist_result;
}
//INITIALIZATION
void setup() {
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
pinMode(trigPin2, OUTPUT);
pinMode(echoPin2, INPUT);
pinMode(errorLED, OUTPUT);
Serial.begin(9600); // Initialize serial communication at 9600 baud rate
delay(3000); // Delay for 3 seconds before starting
}
//BASIC PROGRAM CYCLE
void loop() {
int result1 = ping(); // Check distance for sensor 1
int result2 = ping(); // Check distance for sensor 2
// Define the threshold for detecting obstacles
// Check if either sensor detects an obstacle within the threshold distance
if (result1 <= dist_stop || result2 <= dist_stop) {
// Turn right if sensor 1 detects an obstacle
if (result1 <= dist_stop && result2 > dist_stop) {
motors_back();
delay(500);
motors_stop();
delay(1000);
motors_right();
delay(150);
motors_stop();
delay(1000);
}
// Turn left if sensor 2 detects an obstacle
else if (result2 <= dist_stop && result1 > dist_stop) {
motors_back();
delay(500);
motors_stop();
delay(1000);
motors_left();
delay(150);
motors_stop();
delay(1000);
}
// Turn back if both sensors detect an obstacle
else {
motors_back();
delay(500);
motors_stop();
delay(1000);
motors_left();
delay(500);
motors_stop();
delay(1000);
}
} else { // If no obstacles detected, move forward
motors_forward();
delay(100);
}
}
//MOTOR CONTROL FUNCTIONS
void motors_forward() {
analogWrite(mot1f, mot_speed_left);
analogWrite(mot2f, mot_speed_right);
digitalWrite(mot1b, 0);
digitalWrite(mot2b, 0);
}
void motors_back() {
digitalWrite(mot1f, 0);
digitalWrite(mot2f, 0);
analogWrite(mot1b, mot_speed_left);
analogWrite(mot2b, mot_speed_right);
}
void motors_stop() {
digitalWrite(mot1f, 1);
digitalWrite(mot2f, 1);
digitalWrite(mot1b, 1);
digitalWrite(mot2b, 1);
}
void motors_left() {
analogWrite(mot1f, mot_speed_left);
digitalWrite(mot2f, 0);
digitalWrite(mot1b, 0);
analogWrite(mot2b, mot_speed_right);
}
void motors_right() {
digitalWrite(mot1f, 0);
analogWrite(mot2f, mot_speed_right);
analogWrite(mot1b, mot_speed_left);
digitalWrite(mot2b, 0);
}
void motors_foward_left() {
k = mot_speed_right * 0.8;
analogWrite(mot1f, mot_speed_left);
analogWrite(mot2f, k);
digitalWrite(mot1b, 0);
digitalWrite(mot2b, 0);
}
void motors_foward_right() {
k = mot_speed_left * 0.8;
analogWrite(mot1f, k);
analogWrite(mot2f, mot_speed_right);
analogWrite(mot1b, 0);
analogWrite(mot2b, 0);
}
void motors_back_left() {
k = mot_speed_right * 0.8;
digitalWrite(mot1f, 0);
digitalWrite(mot2f, 0);
analogWrite(mot1b, k);
analogWrite(mot2b, mot_speed_left);
}
void motors_back_right() {
k = mot_speed_left * 0.8;
digitalWrite(mot1f, 0);
digitalWrite(mot2f, 0);
analogWrite(mot1b, mot_speed_right);
analogWrite(mot2b, k);
}
Video
https://drive.google.com/drive/folders/1-3R-BJcoSR2kCpeimbqaGEr41gUFAoxg
Uued funktsioonid
pulseIn() – Loeb pulssi (kas KÕIGE või VÄHEMALT) pin-il.